EGS y EGP en el dominio de la frecuencia
Transformada fasorial del elemento general serie y del elemento general paralelo
Transformada fasorial de elementos activos
La transformada fasorial se restringe a seńales que son del tipo sinusoidal y a circuitos operando en el estado permanente. Esto conlleva a que elementos activos del circuito se restringen a proveer seńales del tipo sinusoidal, en general para una fuente de tensión independiente es;
vk(t) = Vkcos(ωt + αk)  (e11.01)
(e11.01)
la transformada fasorial de dichas funciones es de forma directa;
Vk ∠ αk (e11.02)
en el caso de las fuentes de corriente independientes;
ik(t) = Ikcos(ωt + αk) (e11.03)
la transformada fasorial de dichas funciones también es de forma directa;
Ik ∠ αk (e11.04)
una restricción importante y la cual se observa ahora es que la frecuencia angular ω tiene que ser necesariamente la misma para todo elemento del circuito en cuestión.
Transformada fasorial de EGS y EGP
Por su origen la transformada fasorial tiene prácticamente en donde aplique las mismas propiedades que la transformada de Lapalace o que la transformada de Fourier. Aunque no se demuestra aquí pero una de esas propiedades de la transformada fasorial es la linealidad. La propiedad de linealidad establece que la transformada de una suma es la suma de las transformadas de cada uno de los términos de la suma, esta propiedad se aplica en la obtención de las transformadas fasoriales de las ecuaciones del EGS y de las ecuaciones del EGP.
Fasor de EGS
Las ecuaciones en el dominio del tiempo que representan al elemento general serie (EGS) son:
iR = iC = iL = ifc = ift (e09.01)
vAB = vR + vC + vL - vfc - vft (e09.02)
 (e09.03)
(e09.03)
para las primeras dos ecuaciones representarlas en el dominio de la frecuencia es solamente cuestión de notación y de aplicar la propiedad de linealidad del fasor;
IR = IC = IL = Ifc = Ift (e11.05)
VAB = VR + VC + VL - Vfc - Vft (e11.06)
para la ecuación integro-diferencial (e09.03) se tiene:
 (e11.07)
(e11.07)
si en el circuito no hay inductores con acoplamiento magnético la ecuación anterior (e11.07) se simplifica a;
 (e11.08)
(e11.08)
ahora, es evidente que en la ecuación anterior (e11.08) ya se puede factorizar Ik ;
 (e11.09)
(e11.09)
definiendo la impedancia eléctrica en el dominio de la frecuencia;
 (e11.10)
(e11.10)
arreglando para separar la parte real y la parte imaginaria se expresa como:
 (e11.11)
(e11.11)
y sustituyendo;
Vk = zk Ik - Vfck - Vftk(e11.12)
Es interesante observar que si no hay elementos activos en el EGS lo anterior se reduce a;
Vk = zk Ik (e11.13)
lo cual se le puede llamar como la ley de Ohm en el dominio de la frecuencia.
Retomando las cuestiones para el caso de inductores con acoplamientos magnéticos, se vuelve a escribir la ecuación general para el EGS (e11.07) de la siguiente manera:
 (e11.14)
(e11.14)
o bien:
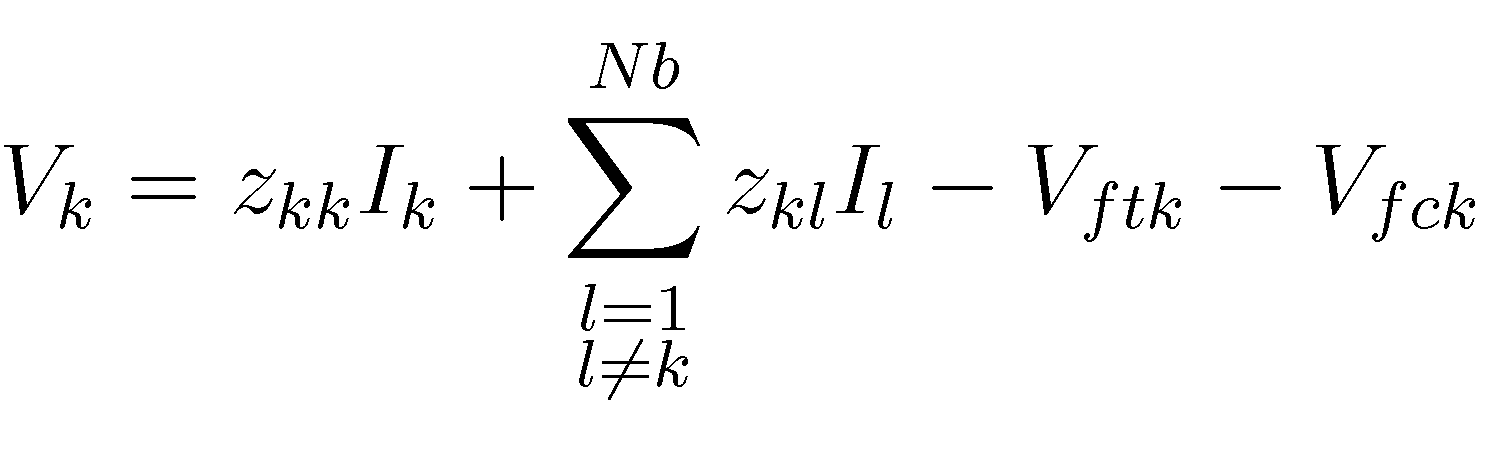 (e11.15)
(e11.15)
donde se define la impedancia propia como:
 (e11.16)
(e11.16)
y la impedancia mutua como:
 (e11.17)
(e11.17)
Se ha de observar que en la ecuación de impedancia propia (e11.16) se arreglaron los términos usando la igualdad -j=1/j (e10.21), en esta forma se puede apreciar en forma explícita la parte real y la parte imaginaria de la impedancia.
Fasor de EGP
Las ecuaciones en el dominio del tiempo que representan al elemento general paralelo (EGP) son:
vR = vC = vL = -vft = -vfc (e09.04)
iAB = iR + iC + iL + ift + ifc (e09.05)
 (e09.06)
(e09.06)
para las primeras dos ecuaciones representarlas en el dominio de la frecuencia es solamente cuestión de notación y de aplicar la propiedad de linealidad del fasor;
VR = VC = VL = -Vft = -Vfc (e11.18)
IAB = IR + IC + IL + Ift + Ifc (e11.19)
para la ecuación integro-diferencial (e09.06) se tiene:
 (e11.20)
(e11.20)
si en el circuito no hay inductores con acoplamiento magnético la ecuación anterior (e11.20) se simplifica a;
 (e11.21)
(e11.21)
ahora, es evidente que en la ecuación anterior (e11.21) ya se puede factorizar Vk ;
 (e11.22)
(e11.22)
definiendo la admitancia eléctrica en el dominio de la frecuencia;
 (e11.23)
(e11.23)
arreglando para separar la parte real y la parte imaginaria se expresa como:
 (e11.24)
(e11.24)
y sustituyendo;
Ik = yk Vk - Ifck - Iftk (e11.25)
Es interesante observar que si no hay elementos activos en el EGP lo anterior se reduce a;
Ik = yk Vk (e11.26)
lo cual también es una expresión de la ley de Ohm en el dominio de la frecuencia.
Retomando las cuestiones para el caso de inductores con acoplamientos magnéticos, se vuelve a escribir la ecuación general para el EGP (e11.20) de la siguiente manera:
 (e11.27)
(e11.27)
o bien:
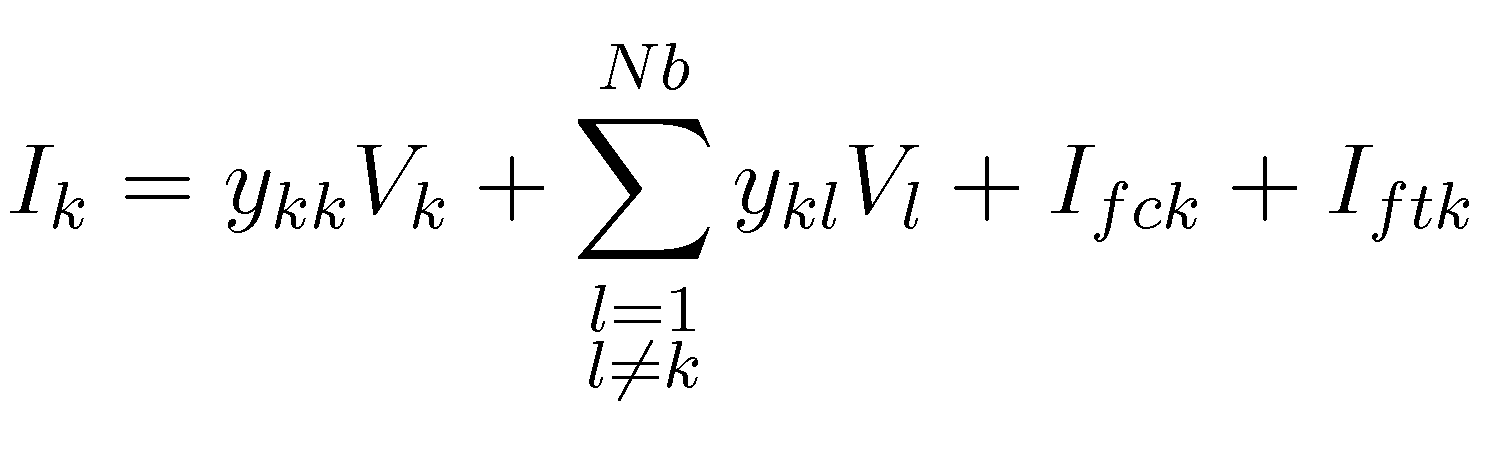 (e11.28)
(e11.28)
donde se define la admitancia propia como:
 (e11.29)
(e11.29)
y la admitancia mutua como:
 (e11.30)
(e11.30)
Se ha de observar que en la ecuación de admitancia propia (e11.29) se arreglaron los términos usando la igualdad -j=1/j (e10.21), en esta forma se puede apreciar en forma explícita la parte real y la parte imaginaria de la admitancia.
A veces en algunos textos sobre circuitos eléctricos se encuentran los términos Reactancia y Susceptancia, simplemente se definen de la siguiente forma:
Reactancia Xk ; es la parte imaginaria de la impedancia, con base a la definición de impedancia (e11.10):
 (e11.31)
(e11.31)
Susceptancia Bk ; es la parte imaginaria de la admitancia, con base a la definición de admitancia (e11.23):
 (e11.32)
(e11.32)
Ejemplos de análisis con fasores
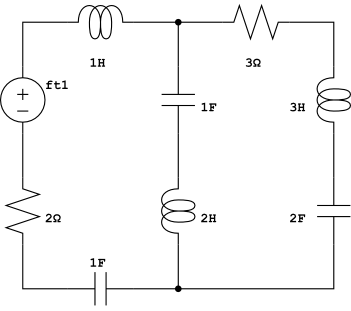
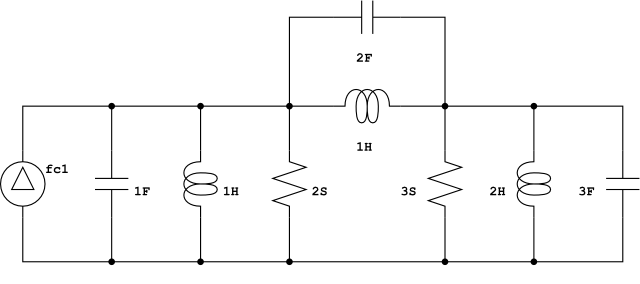
 En la práctica de la teoría de circuitos es común aplicar el método de mallas y el método de nodos, las recomendaciones para aplicar uno u otro método se han expuesto anteriormente, así, en el circuito siguiente se aplicará el método de mallas:
En la práctica de la teoría de circuitos es común aplicar el método de mallas y el método de nodos, las recomendaciones para aplicar uno u otro método se han expuesto anteriormente, así, en el circuito siguiente se aplicará el método de mallas:
 (d11.01)
(d11.01)
vft1 = 3 cos( 5t + π/2)
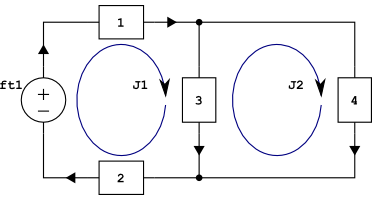
A criterio se proponen las impedancias, las mallas independientes y sus referencias:
 (d11.02)
(d11.02)
El fasor correspondiente a la fuente de tensión es:
 (e11.33)
(e11.33)
las impedancias son:
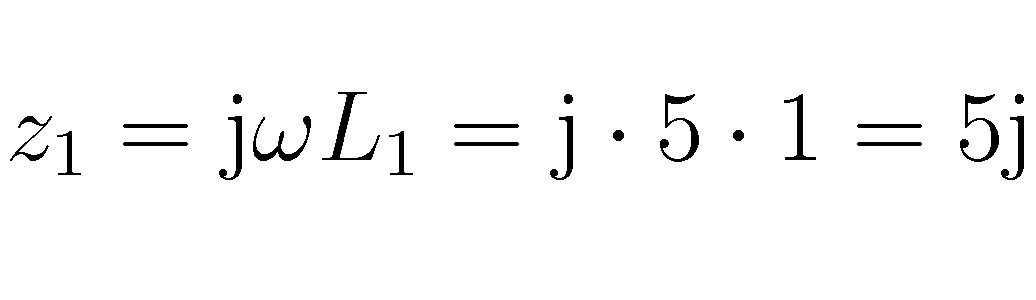 (e11.34)
(e11.34)
 (e11.35)
(e11.35)
 (e11.36)
(e11.36)
 (e11.37)
(e11.37)
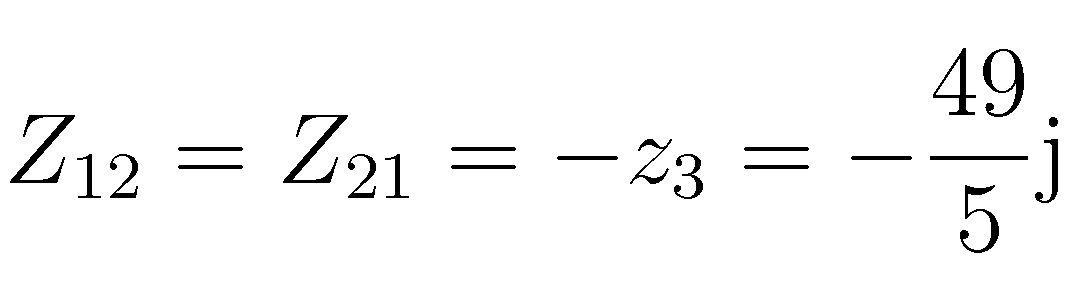
las impedancias de malla son:
 (e11.38)
(e11.38)
 (e11.39)
(e11.39)
 (e11.40)
(e11.40)
el sistema de ecuaciones es:
 (e11.41)
(e11.41)
 (e11.42)
(e11.42)
sustituyendo los valores:
 (e11.43)
(e11.43)
 (e11.44)
(e11.44)
aplicando MatLab:
a = [ (2+j*73/5) (-j*49/5) ; (-j*49/5) (3+j*247/10)]
v = [3j ; 0]
J = inv(a) * v
entonces las corrientes de malla en el dominio de la frecuencia en representación rectangular son:
 (e11.45)
(e11.45)
 (e11.46)
(e11.46)
para llevarlas al dominio del tiempo es necesario representarlas en su forma polar, de nuevo aplicando MatLab:
abs(J)
angle(J)/pi
luego, se escribe:
 (e11.47)
(e11.47)
 (e11.48)
(e11.48)
y de aquí directamente al dominio de la frecuencia se puede escribir:
 (e11.49)
(e11.49)
 (e11.50)
(e11.50)
del circuito, es de observar que la corriente de malla 1 es directamente la corriente de la fuente de tensión 1 y la corriente de malla 2 es directamente la corriente 4, los demás parámetros son obtenidos de una forma similar.
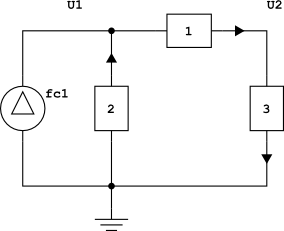
En el circuito siguiente se aplicará el método de nodos:
 (d11.03)
(d11.03)
vft1 = 3 cos( 5t + π/2)
A criterio se proponen las impedancias, las mallas independientes y sus referencias:
 (d11.04)
(d11.04)
El fasor correspondiente a la fuente de corriente es:
 (e11.51)
(e11.51)
las admitancias son:
 (e11.52)
(e11.52)
 (e11.53)
(e11.53)
 (e11.54)
(e11.54)
las admitancias de nodos son:
 (e11.55)
(e11.55)
 (e11.56)
(e11.56)
 (e11.57)
(e11.57)
el sistema de ecuaciones es:
 (e11.58)
(e11.58)
 (e11.59)
(e11.59)
sustituyendo los valores:
 (e11.60)
(e11.60)
 (e11.61)
(e11.61)
aplicando MatLab:
a = [ (2+j*73/5) (-j*49/5) ; (-j*49/5) (3+j*247/10)]
v = [3j ; 0]
U = inv(a) * v
entonces las tensiones de nodos en el dominio de la frecuencia en representación rectangular son:
 (e11.62)
(e11.62)
 (e11.63)
(e11.63)
para llevarlas al dominio del tiempo es necesario representarlas en su forma polar, de nuevo aplicando MatLab:
abs(U)
angle(U)/pi
luego, se escribe:
 (e11.64)
(e11.64)
 (e11.65)
(e11.65)
y de aquí directamente al dominio de la frecuencia se puede escribir:
 (e11.66)
(e11.66)
 (e11.67)
(e11.67)
un vez determinadas estas tensiones de nodos, cualquier otra incógnita del circuito se puede determinar de forma sencilla aplicando la ecuación correspondiente.